 |
Ingeniería mecatrónica
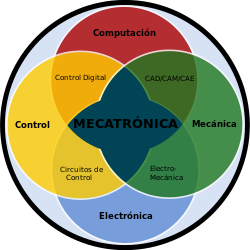
La ingeniería mecatrónica es una disciplina que une la ingeniería mecánica, ingeniería electrónica, ingeniería de control e ingeniería informática, y sirve para diseñar y desarrollar productos que involucren sistemas de control para el diseño de productos o procesos inteligentes, lo cual busca crear maquinaria más compleja para facilitar las actividades del ser humano a través de procesos electrónicos en la industria mecánica, principalmente. Debido a que combina varias ingenierías en una sola, su punto fuerte es la versatilidad.
Un consenso común es describir a la mecatrónica como una disciplina integradora de las áreas de mecánica, electrónica e informática cuyo objetivo es proporcionar mejores productos, procesos y sistemas. La mecatrónica no es, por tanto, una nueva rama de la ingeniería, sino un concepto recientemente desarrollado que enfatiza la necesidad de integración y de una interacción intensiva entre diferentes áreas de la ingeniería.
Con base en lo anterior, se puede hacer referencia a la definición propuesta por J. A. Rietdijk: "Mecatrónica es la combinación sinérgica de la ingeniería mecánica de precisión, de la electrónica, del control automático y de los sistemas para el diseño de productos y procesos", la cual busca crear maquinaria más compleja para facilitar las actividades del ser humano a través de procesos electrónicos en la industria mecánica principalmente. Existen, claro está, otras versiones de esta definición, pero ésta claramente enfatiza que la mecatrónica está dirigida a las aplicaciones y al diseño.
Áreas del conocimiento
La mecatrónica nace para suplir tres necesidades latentes; la primera, encaminada a automatizar la maquinaría y lograr así procesos productivos ágiles y confiables; la segunda crear productos inteligentes, que respondan a las necesidades del mundo moderno; y la tercera, por cierto muy importante, armonizar entre los componentes mecánicos y electrónicos de las máquinas, ya que en muchas ocasiones, era casi imposible lograr que tanto mecánica como electrónica manejaran los mismos términos y procesos para hacer o reparar equipos.
Un ingeniero en mecatrónica es un profesional con amplio conocimiento teórico, práctico y multidisciplinario capaz de integrar y desarrollar sistemas automatizados y/o autónomos que involucren tecnologías de varios campos de la ingeniería. Este especialista entiende sobre el funcionamiento de los componentes mecánicos, eléctricos, electrónicos y computacionales de los procesos industriales, y tiene como referencia el desarrollo sostenible.
 Tiene la capacidad de seleccionar los mejores métodos y tecnologías para diseñar y desarrollar de forma integral un producto o proceso, haciéndolo más compacto, de menor costo, con valor agregado en su funcionalidad, calidad y desempeño. Su enfoque principal es la automatización industrial, la innovación en el diseño y la construcción de dispositivos y máquinas inteligentes.
Tiene la capacidad de seleccionar los mejores métodos y tecnologías para diseñar y desarrollar de forma integral un producto o proceso, haciéndolo más compacto, de menor costo, con valor agregado en su funcionalidad, calidad y desempeño. Su enfoque principal es la automatización industrial, la innovación en el diseño y la construcción de dispositivos y máquinas inteligentes.
Un ingeniero mecatrónico se capacita para:
- Diseñar, construir e implementar productos y sistemas mecatrónicos para satisfacer necesidades emergentes, bajo el compromiso ético de su impacto económico, social, ambiental y político.
- Generar soluciones basadas en la creatividad, innovación y mejora continua de sistemas de control y automatización de procesos industriales.
- Apoyar a la competitividad de las empresas a través de la automatización de procesos.
- Evaluar, seleccionar e integrar dispositivos y máquinas mecatrónicas, tales como robots, tornos de control numérico, controladores lógicos programables, computadoras industriales, entre otros, para el mejoramiento de procesos industriales de manufactura.
Uso útil
Entendiendo que la Mecatrónica abarca disciplinas muy amplias y complejas podemos decir que tiene muchos campos de aplicación. De hecho, la Mecatrónica pretende ser esa disciplina o Ingeniería en la que los productos se fabriquen teniendo en cuenta todas las ingenierías y no estando separadas como tradicionalmente. Su punto fuerte es la versatilidad para crear mejores productos, procesos o sistemas. La Mecatrónica no es un concepto nuevo o una ingeniera nueva, sino, la síntesis de ciertas áreas de ingeniería.
Su principal objetivo es cubrir ciertas necesidades como

- Automatizar la maquinaria: así se consigue que sea ágil, productiva y fiable.
- Creación de productos inteligentes: que sobre todo responden a las necesidades del ser humano.
- Que haya armonía entre componentes mecánicos y electrónicos (hasta ahora la mecánica y la electrónica no manejaban los mismo términos lo que dificultaba los procesos de fabricación o reparación de diferentes equipos).
- Las principales industrias que utilizan la Mecatrónica son
- Empresas de la Industria de la Automatización: empresas que utilizan sistemas o elementos computarizados y electromecánicos para controlar maquinarias y/o procesos industriales.
- Empresas de la Industria de Manufactura Flexible: aquellas que se dedican a fabricar sistemas o componentes eléctricos o electrónicos de forma automática.
Por tanto, la Mecatrónica puede aplicarse a muchos campos, desde la medicina hasta la minería, pasando por la industria farmacéutica, industria mecánica, automovilística, textil, comunicaciones, alimentación, comercio… y un largo etcétera.
La fabricación de productos como robots, automóviles, órganos humanos biónicos, naves aeroespaciales, aviones, etc., están basados ya en esta disciplina.










{kind=link}